




Attitydmätningssystem




Produktfunktioner
MS-100A0 är en attityd med tre frihetsgrader baserad på mikromekanisk teknologi (MEMS)
Mätsystem, inbyggt högpresterande MEMS-gyroskop och MEMS-accelerometer, genom filtreringsalgoritmen beräknar stigningsvinkeln, rullningsvinkeln och kursvinkeln för bäraren i realtid.även valfritt matchad med en magnetometer för att uppnå hög precision i norr, och utgående 3-axlig vinkelhastighet och 3-axlig acceleration används för rörelsekontroll.
Produktegenskaper
- Bättre än 0,1° attitydnoggrannhet
- Attitydmätområde ±90°
- Drifttemperaturområde: -40~65℃
- Vibrationsmiljö: 10~2000Hz, 6g (RMS)
- Rika gränssnittstyper, stöder RS232, RS422, CAN och andra standardgränssnitt
- Vattentät tätningsdesign
Elektriska egenskaper
- Strömförsörjning: 5V (typ.), anpassningsbar bred spänningsingång 12~36V
- Märkeffekt: 0,5W (max)
- Ripple: 100mV (topp-till-topp)
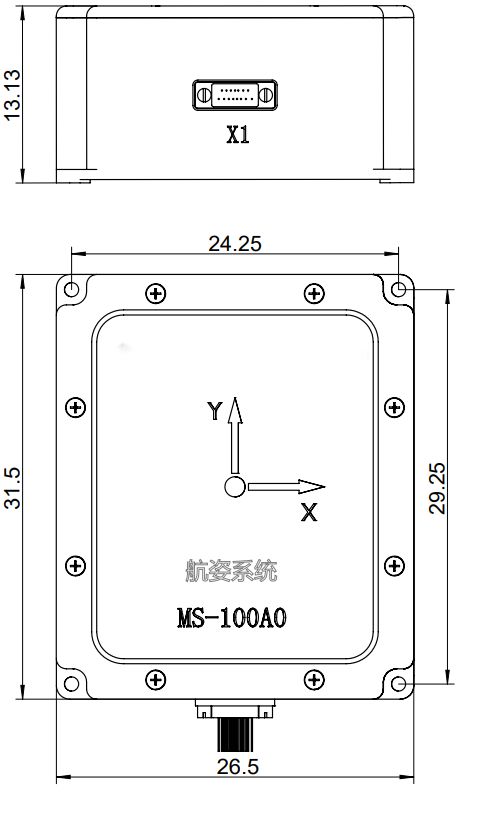
Mekaniska mått
Tekniska indikatorer
| Gyroparametrar | ||||
| Parameter |
Testvillkor | Typiskt värde |
Max värde | Enhet |
| Dynamiskt mätområde |
|
| 450 | º/s |
| Noll bias stabilitet | Allan-varians, Z-axel | 0,8 |
| º/h |
| Allan-varians, X-axel och Y-axel | 1.6 |
| º/h | |
| 10s medel, X, Y-axel (-40℃~+80℃, konstant temperatur) | 6 |
| º/h | |
| 1s medel, X, Y-axel (-40℃~+80℃, konstant temperatur) | 9 |
| º/h | |
| Noll offset | Noll offset intervall | ±0,2 |
| º/s |
| Noll förspänningsförändring över hela temperaturområdet | ±0,06 |
| º/s | |
| Repeterbarhet från början till start | 0,006 |
| º/s | |
| Startupprepning från dag till dag | 0,009 |
| º/s | |
| Inverkan av linjär acceleration på nollbias | 0,002 |
| º/s | |
| Inverkan av vibrationer på nollförskjutning, förändringen före och efter vibration | 0,002 |
| º/s | |
| Inverkan av vibration på nollförskjutning, förändringen före vibration | 0,002 |
| º/s | |
| Skalfaktor | Skalfaktornoggrannhet, Z-axel | 0,3 |
| % |
| Skalfaktornoggrannhet, X, Y-axel | 0,6 |
| % | |
| Skalfaktor olinjäritet, Z-axel | 0,01 |
| %FS | |
| Skalfaktor olinjäritet, X, Y-axel | 0,02 |
| %FS | |
| Vinkel slumpmässig promenad |
| 0,001 |
| °/√h |
|
Bullerdensitet |
| 0,001 |
| °/s/√h |
| Upplösning |
| 3,052×10−7 |
| º/s/LSB |
| Bandbredd |
| 200 |
| Hz |
| Accelerometer parametrar | ||||
| Parameter |
Testvillkor |
Typiskt värde | Max värde | Enhet |
| Dynamiskt mätområde |
| 16 |
| g |
| Noll bias stabilitet | Allan varians | 0,03 |
| mg |
| 10s genomsnitt (-40℃~+80℃, konstant temperatur) | 0,2 |
| mg | |
| 1s genomsnitt (-40℃~+80℃, konstant temperatur) | 0...3 |
| mg | |
| Noll offset | Noll offset intervall | 5 |
| mg |
|
Noll offset variation (topp-till-topp) över hela temperaturområdet | 5 |
| mg | |
| Repeterbarhet från början till start | 0,5 |
| mg | |
| Startupprepning från dag till dag | 0,8 |
| mg | |
| Noll bias temperaturkoefficient | 0,05 | 0,1 | mg/℃ | |
| Skalfaktor | Skalfaktornoggrannhet | 0,5 |
| % |
| Skalfaktor olinjäritet | 0,1 |
| %FS | |
| Hastighet slumpmässig promenad |
| 0,029 |
| m/s/√h |
| Bullerdensitet |
| 0,025 |
| mg/√Hz |
| Upplösning |
| 1,221×10−8 |
| g/LSB |
| Bandbredd |
| 200 |
| Hz |
| Magnetometerparametrar (valfritt) | ||||
| Parameter | Testvillkor |
Typiskt värde | Max värde |
Enhet |
| Dynamiskt mätområde |
| 2.5 |
| gauss |
| Noll offset | Icke-magnetisk miljö | 15 |
| mgauss |
| Riktningsnoggrannhet | ||||
| Magnetisk kursnoggrannhet |
| 0,5 |
| ° |
| Horisontell attityd noggrannhet | ||||
|
Pitchvinkelnoggrannhet |
| 0,1 |
| ° |
| Rullvinkelnoggrannhet |
| 0,1 |
| ° |
| Gyroparametrar | ||||
| Parameter |
Testvillkor | Typiskt värde |
Max värde | Enhet |
| Dynamiskt mätområde |
|
| 450 | º/s |
| Noll bias stabilitet | Allan-varians, Z-axel | 0,8 |
| º/h |
| Allan-varians, X-axel och Y-axel | 1.6 |
| º/h | |
| 10s medel, X, Y-axel (-40℃~+80℃, konstant temperatur) | 6 |
| º/h | |
| 1s medel, X, Y-axel (-40℃~+80℃, konstant temperatur) | 9 |
| º/h | |
| Noll offset | Noll offset intervall | ±0,2 |
| º/s |
| Noll förspänningsförändring över hela temperaturområdet | ±0,06 |
| º/s | |
| Repeterbarhet från början till start | 0,006 |
| º/s | |
| Startupprepning från dag till dag | 0,009 |
| º/s | |
| Inverkan av linjär acceleration på nollbias | 0,002 |
| º/s | |
| Inverkan av vibrationer på nollförskjutning, förändringen före och efter vibration | 0,002 |
| º/s | |
| Inverkan av vibration på nollförskjutning, förändringen före vibration | 0,002 |
| º/s | |
| Skalfaktor | Skalfaktornoggrannhet, Z-axel | 0,3 |
| % |
| Skalfaktornoggrannhet, X, Y-axel | 0,6 |
| % | |
| Skalfaktor olinjäritet, Z-axel | 0,01 |
| %FS | |
| Skalfaktor olinjäritet, X, Y-axel | 0,02 |
| %FS | |
| Vinkel slumpmässig promenad |
| 0,001 |
| °/√h |
|
Bullerdensitet |
| 0,001 |
| °/s/√h |
| Upplösning |
| 3,052×10−7 |
| º/s/LSB |
| Bandbredd |
| 200 |
| Hz |
| Accelerometer parametrar | ||||
| Parameter |
Testvillkor |
Typiskt värde | Max värde | Enhet |
| Dynamiskt mätområde |
| 16 |
| g |
| Noll bias stabilitet | Allan varians | 0,03 |
| mg |
| 10s genomsnitt (-40℃~+80℃, konstant temperatur) | 0,2 |
| mg | |
| 1s genomsnitt (-40℃~+80℃, konstant temperatur) | 0...3 |
| mg | |
| Noll offset | Noll offset intervall | 5 |
| mg |
|
Noll offset variation (topp-till-topp) över hela temperaturområdet | 5 |
| mg | |
| Repeterbarhet från början till start | 0,5 |
| mg | |
| Startupprepning från dag till dag | 0,8 |
| mg | |
| Noll bias temperaturkoefficient | 0,05 | 0,1 | mg/℃ | |
| Skalfaktor | Skalfaktornoggrannhet | 0,5 |
| % |
| Skalfaktor olinjäritet | 0,1 |
| %FS | |
| Hastighet slumpmässig promenad |
| 0,029 |
| m/s/√h |
| Bullerdensitet |
| 0,025 |
| mg/√Hz |
| Upplösning |
| 1,221×10−8 |
| g/LSB |
| Bandbredd |
| 200 |
| Hz |
| Magnetometerparametrar (valfritt) | ||||
| Parameter | Testvillkor |
Typiskt värde | Max värde |
Enhet |
| Dynamiskt mätområde |
| 2.5 |
| gauss |
| Noll offset | Icke-magnetisk miljö | 15 |
| mgauss |
| Riktningsnoggrannhet | ||||
| Magnetisk kursnoggrannhet |
| 0,5 |
| ° |
| Horisontell attityd noggrannhet | ||||
|
Pitchvinkelnoggrannhet |
| 0,1 |
| ° |
| Rullvinkelnoggrannhet |
| 0,1 |
| ° |


